3D 变换¶
3D 旋转¶
欧拉角¶
基本概念¶
- 绕 \(x\) 轴旋转 \(\alpha\):
- 绕 \(y\) 轴旋转 \(\beta\):
- 绕 \(z\) 轴旋转 \(\gamma\):
以 \(R_z\) 为例,其效果相当于沿 \(z\) 轴负方向看去(从上往下看),物体逆时针旋转 \(\alpha\),符合右手定则。
欧拉角就是将一个旋转分解为三个绕坐标轴的旋转,可以细分为经典欧拉角和泰特布莱恩角。经典欧拉角和泰特布莱恩角的区别在于旋转次序不同:
- 经典欧拉角(Proper Euler angles):旋转次序有 \(ZXZ\)、\(ZYZ\)、\(XYX\)、\(YXY\)、\(YZY\)、\(XZX\) 六种
- 泰特布莱恩角(Tait–Bryan angles):旋转次序有 \(XYZ\)、\(XZY\)、\(YXZ\)、\(YZX\)、\(ZXY\)、\(ZYX\) 六种
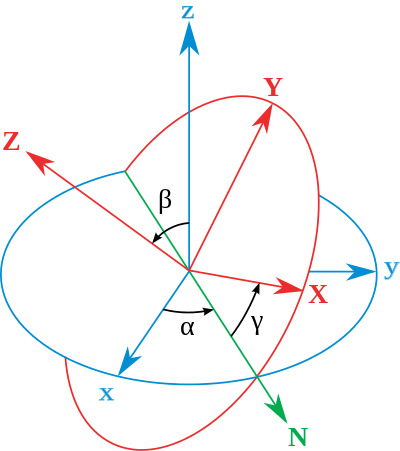
经典欧拉角最常见的是 \(ZXZ\) 顺规,即先绕 \(z\) 轴旋转 \(\alpha\),再绕新生成的 \(x\) 轴旋转 \(\beta\),最后绕新生成的 \(z\) 轴旋转 \(\gamma\),如下图所示:
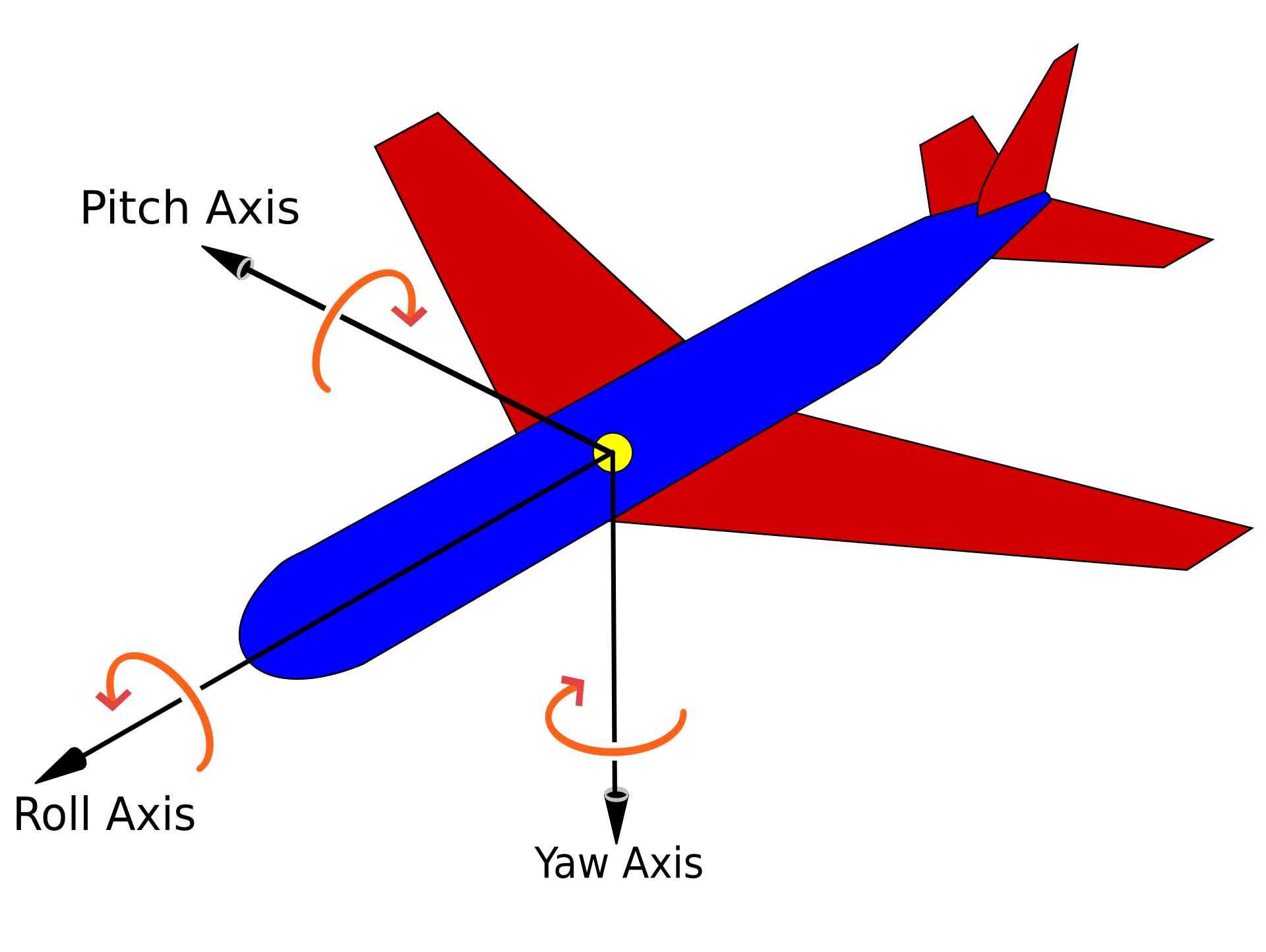
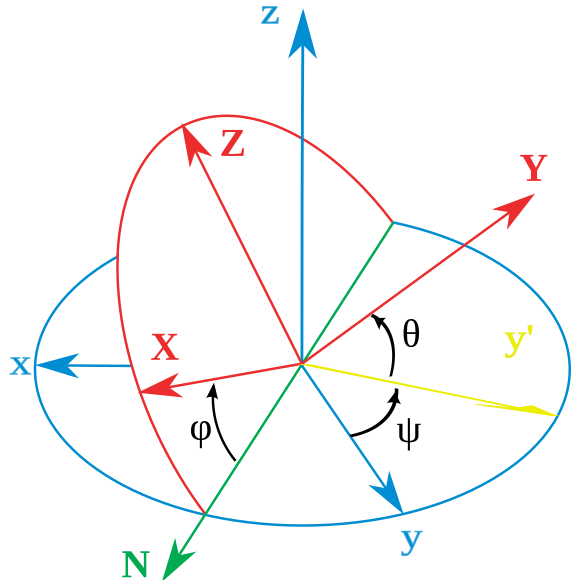
泰特布莱恩角最常见的是 \(ZXY\) 顺规,\(\psi\)、\(\theta\)、\(\varphi\) 分别对应着 yaw 偏航角、pitch 俯仰角和 roll 滚转角,用于飞行器的姿态控制:
内旋和外旋¶
- 内旋(Intrinsic Rotation):围绕物体自身的坐标系旋转,物体的坐标系会随之改变
- 外旋(Extrinsic Rotation):围绕固定的世界坐标系旋转
对于 \(XYZ\) 顺规的内旋,设点 \(P\) 的坐标为 \(p\),先绕初始 \(x\) 轴旋转 \(\alpha\) 得到
然后绕新生成的 \(y\) 轴旋转 \(\beta\),这等价于先将物品坐标系逆变换回世界坐标系,再绕世界坐标系的 \(y\) 轴旋转 \(\beta\),最后再变换回物品坐标系:
最后绕新生成的 \(z\) 轴旋转 \(\gamma\),同上类似可以得到
\(p'''\) 就是三次内旋后点 \(P\) 在世界坐标系中的坐标,与 \(ZYX\) 顺规的外旋等价。
由此可见,内旋与外旋的绕轴旋转顺序相反时,两者等效。
万向节死锁¶
在 Unity 中,欧拉角采取的是 \(ZXY\) 顺规的外旋,如果绕 \(x\) 轴旋转的角度为 \(90^\circ\),那么物品坐标系的 \(z\) 轴就会和世界坐标系的 \(y\) 轴重合,此时再绕世界坐标系的 \(y\) 轴旋转,效应就与最开始绕 \(z\) 轴旋转一样,少了一个自由度。
这就是万向节死锁(Gimbal Lock)问题,即当任意两个旋转轴重合时,就会失去一个自由度,使物体无法绕某一方向旋转。万向节死锁是由欧拉角的内在局限性导致的。
即使在没有万向锁的情况下,欧拉角的表示也不是唯一的,三维空间中每个旋转都可以用至少两个欧拉角来表示。欧拉角的歧义性主要源于其定义方式,即通过三个连续的旋转来描述最终的旋转。这些旋转是相对于不同的轴进行的,因此旋转的顺序和中间的旋转状态都会影响最终的结果。
轴角表示¶
轴角表示(Axis-Angle Representation)是另一种用于描述三维空间中刚体旋转的方法。它通过一个单位向量(旋转轴)和一个标量(旋转角度)来唯一地表示一个旋转。
给定一个向量 \(\mathbf{v}\),要将其绕旋转轴 \(\mathbf{n}\) 旋转角度 \(\theta\),可以使用罗德里格斯公式(Rodrigues' Rotation Formula)来计算:
首先,可以将 \(\mathbf{v}\) 分解为平行于 \(\mathbf{n}\) 的分量 \(\mathbf{v_{\parallel}}\) 和垂直于 \(\mathbf{n}\) 的分量 \(\mathbf{v_{\perp}}\) 两部分:
其中,\(\mathbf{n} \times \mathbf{v}\) 可以看作将 \(\mathbf{v_{\perp}}\) 逆时针旋转 \(90^\circ\),\(\mathbf{n} \times (\mathbf{n} \times \mathbf{v})\) 可以看作将 \(\mathbf{v_{\perp}}\) 逆时针旋转 \(180^\circ\)。因此,将 \(\mathbf{v_{\perp}}\) 逆时针旋转 \(\theta\) 后可得:
然后可得:
对应的旋转矩阵就是:
四元数¶
基本性质¶
四元数(Quaternion)是一种用于表示旋转的数学工具,它可以看作是复数的推广,由一个实部和三个虚部组成。四元数的基本形式是:
其中,\(w\) 是实部,\(x, y, z\) 是虚部,\(\mathbf{v} = (x, y, z)\)。
虚部的乘法规则是:
四元数乘法的向量形式是:
四元数乘法的矩阵形式是:
此外还有几个重要的性质:
- 四元数的模:\(\|q\| = \sqrt{w^2 + x^2 + y^2 + z^2}\)
- 四元数的共轭:\(q^* = (w, -\mathbf{v})\)
- 四元数的逆:\(q^{-1} = q^*/\|q\|^2\),当 \(q\) 是单位四元数时,\(q^{-1} = q^*\)
- 共轭和逆的性质:\((pq)^* = q^*p^*\),\((pq)^{-1} = q^{-1}p^{-1}\)
- 四元数运算满足结合律和分配律,不满足交换律
旋转表示¶
令 \(ijk\) 组成的空间为三维空间,实部 \(w\) 为第四维,垂直于三维空间。
现在观察 \(i\) 这个虚部,它左乘 \(jk\) 平面中的向量相当于让其绕 \(i\) 轴逆时针旋转 \(90^\circ\),右乘相当于绕 \(i\) 轴顺时针旋转 \(90^\circ\),而乘以 \(1i\) 复平面中的向量则相当于让其旋转 \(90^\circ\)(满足交换律,左乘和右乘是同一方向)。
推广到单位向量 \(\mathbf{v} = xi + yj + zk\),可以类似地得到,\(\mathbf{v}\) 左乘三维空间中垂直于 \(\mathbf{v}\) 的向量相当于让其绕 \(\mathbf{v}\) 逆时针旋转 \(90^\circ\),右乘相当于绕 \(\mathbf{v}\) 顺时针旋转 \(90^\circ\),而乘以 \(1\mathbf{v}\) 复平面中的向量则相当于让其旋转 \(90^\circ\)。
再推广到任意单位四元数 \(q = \cos\theta + \mathbf{v} \sin\theta\),令其左乘 \(p\),可以得到:
- 将 \(\mathbf{v}\) 看作一个新的虚部,参考复数乘法的几何含义,\(q\) 乘以 \(p\) 在 \(1\mathbf{v}\) 复平面中的分量相当于让其旋转 \(\theta\)
- 对于 \(p\) 在三维空间中的分量 \(\mathbf{u}\),由之前的结论可得 \(\mathbf{v} \cdot \mathbf{u}\) 是 \(\mathbf{u}\) 在三维空间中绕 \(\mathbf{v}\) 逆时针旋转 \(90^\circ\) 的结果,因此 \(q \cdot \mathbf{u} = \mathbf{u} \cos\theta + \mathbf{v} \cdot \mathbf{u} \sin\theta\) 是 \(\mathbf{u}\) 在三维空间中绕 \(\mathbf{v}\) 逆时针旋转 \(\theta\) 的结果
同理,\(q^{-1}\) 右乘 \(p\),相当于 \(p\) 的虚部分量绕 \(\mathbf{v}\) 逆时针旋转 \(\theta\),在 \(1\mathbf{v}\) 复平面中的分量反方向旋转 \(\theta\)。
综上,\(qpq^{-1}\) 或 \(qpq^*\) 相当于 \(p\) 在三维空间中绕 \(\mathbf{v}\) 逆时针旋转 \(2\theta\),在 \(1\mathbf{v}\) 复平面中的旋转抵消。
此时对于一个三维旋转,我们可以将要旋转的向量写成 \(p = (0, \mathbf{v})\),将旋转表示为 \(q = (\cos \frac{\theta}{2}, \mathbf{n} \sin \frac{\theta}{2})\),通过计算 \(qpq^{-1}\) 或 \(qpq^*\) 来得到旋转结果 \(p' = (0, \mathbf{v'})\)。
观测变换¶
观测变换(Viewing Transformation)是将世界坐标系中的物体转换到观察者的坐标系中的过程,包括:
- 视图变换:将观察者的位置和方向转换到原点
- 投影变换:将裁剪空间变换为 NDC(Normalized Device Coordinates,归一化设备坐标)空间,分为正交投影和透视投影
视图/相机变换¶
在三维计算机图形学中,为了模拟观察者的视角,需要将世界坐标系中的对象转换为相对于观察者的坐标系。视图变换通过平移和旋转相结合的方式,使观察者位于原点,观察方向指向负 \(Z\) 轴,上方向指向正 \(Y\) 轴,同时移动其他所有物体。
设相机的位置为 \(\vec{e}\),看向的方向为 \(\hat{g}\),上方向为 \(\hat{t}\),则需要:
- 将 \(\vec{e}\) 平移到原点
- 将 \(\hat{g}\) 旋转到 \(-Z\)
- 将 \(\hat{t}\) 旋转到 \(Y\)
- 将 \(\hat{g} \times \hat{t}\) 旋转到 \(X\)
平移矩阵显然是:
由于直接求旋转矩阵较为困难,我们可以先求出该旋转矩阵的逆矩阵,再将其转置即可:
然后将 \(R_{view}\) 和 \(T_{view}\) 相乘即可得到视图变换矩阵:
投影变换¶
正交投影¶
正交投影(Orthographic Projection)通过平移和缩放,将一个 \([l, r] \times [b, t] \times [f, n]\) 的长方体(Cuboid)映射到 \([-1, 1]^3\) 的标准立方体(Canonical Cube)。
易得投影矩阵为:
正交投影直接丢弃 \(Z\) 坐标,投影后的物体大小不会随着距离的增加而变化。
透视投影¶
透视投影(Perspective Projection)通过将视锥体中的点投影到近裁剪面上,来为进一步的渲染工作做准备,具体做法是:
- 通过透视除法将视锥体(Frustum)压缩为一个长方体
- 通过正交投影将长方体映射到标准立方体。
假设视锥体的近裁剪面的距离为 \(n\),远裁剪面的距离为 \(f\),为了使视线上的每个点都投影在近裁剪面的相同位置,需要使:
在齐次坐标中,就是要做到:
为了保持压缩后的标准立方体位置不变,需要使近裁剪面和远裁剪面的 \(z\) 坐标不变,由此列出方程组,容易解得第一步的矩阵为:
最后可得透视投影矩阵为:
在 OpenGL 中,观察方向是朝着 \(z\) 轴负方向的,而通常 \(n\) 和 \(f\) 又必须指定为大于 0,因此是将 \([l, r] \times [b, t] \times [-n, -f]\) 映射到 \([-1, 1]^3\),投影坐标变为 \(x' = -\frac{n}{z}x\) 和 \(y' = -\frac{n}{z}y\),对应的透视投影矩阵变为:
此时设 \(-z' = M_{persp} (-z)\),就有:
可以看到,投影后的深度值并不是线性分布的,当 \(f \gg n\) 时,大部分深度值会更靠近 1,远处物体的深度精度会非常差,容易出现 z-fighting 问题,因此最好保持 \(\frac{f}{n} < 100\)。
视口变换¶
视口变换(Viewport transformation)是将归一化设备坐标 NDC 转换为屏幕坐标的过程,会将 \([-1, 1]^2\) 的 XY 平面映射到 \([0, width] \times [0, height]\) 的屏幕坐标系中。
视口变换矩阵为:
由此,就完成了将物体 3D 坐标转变为屏幕空间 2D 坐标的过程,完整流程具体如下:
- 模型变换(Model transformation):将物体的局部坐标系转换为世界坐标系
- 视图变换(View transformation):将世界坐标系转换为相机坐标系
- 投影变换(Projection transformation):将相机空间(Camera Space)转换为裁剪空间(Clip Space),再将齐次坐标除以 \(w\) 得到归一化设备坐标(NDC)
- 视口变换(Viewport transformation):将 NDC 转换为屏幕坐标系
即 模型空间 → 世界空间 → 观察空间 → 裁剪空间 → NDC → 屏幕空间。